Recently, the research team of Research Fellow Hu De with the National & Local Joint Engineering Research Center of Intelligent Information Processing Technology for Mongolian(Inner Mongolia Key Laboratory of Mongolian Information Processing Technology) of the College of Computer Science(Software) of IMU has cooperated with the research team of Prof. Yin Fuliang of Dalian University of Technology to publish in the international top journal-IEEE Transactions on Intelligent Transportation Systems the article titled “Acoustic SLAM with Moving Sound Event based on Auxiliary Microphone Arrays”(DOI: 10.1109/TITS.2023.3289324).
Simultaneous localization and mapping(SLAM) plays a very important role in the exploration of the unknown environment by robots. At present, vision-based SLAM has been well-developed and a lot of products concerned have been applied. However, in the environment with inadequate lighting, the performance of vison-based SLAMs will be much poorer. Due to this, this paper proposes an acoustic SLAM (ASLAM) approach which makes use of the auditory system of robots to explore the acoustic field around them and localize the robots and sound sources in the environment.
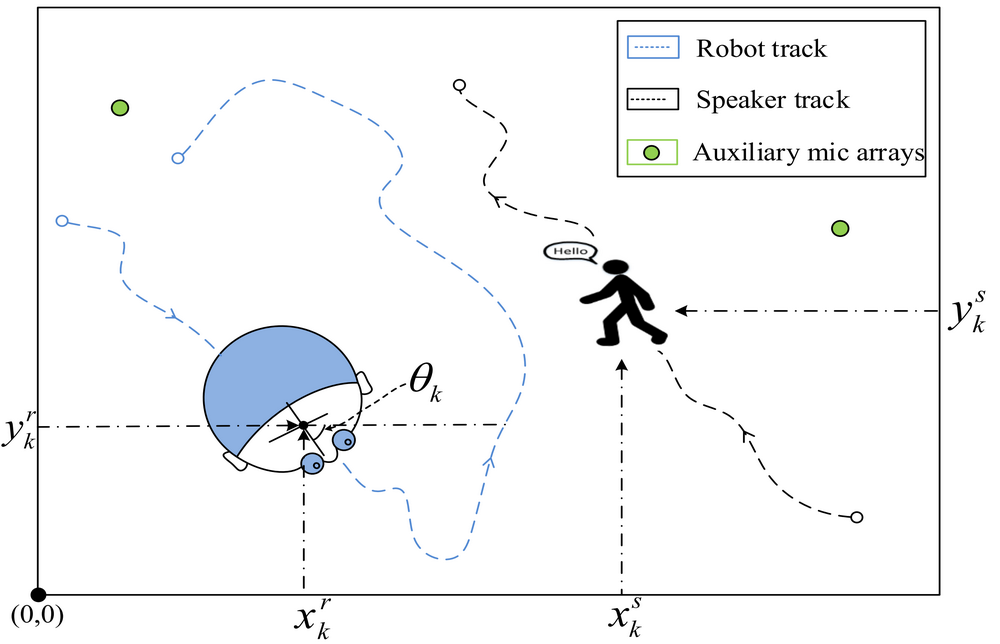
Fig. 1 ASLAM diagram in indoor environment
First, this article proposes an ASLAM scheme and realizes for the first time ASLAM mission while robots and speaker are moving simultaneously. Second, this article proposes a dual-unscented Kalman filter which is used to estimate in real time the robot position and location of sound sources. Compared with traditional Kalman filter, this filter can reduce computation burden to satisfy the algorithmic requirement of instantaneity. Finally, interacting multiple models(IMM) is proposed to model the movement of robots and speaker to further improve localization accuracy.
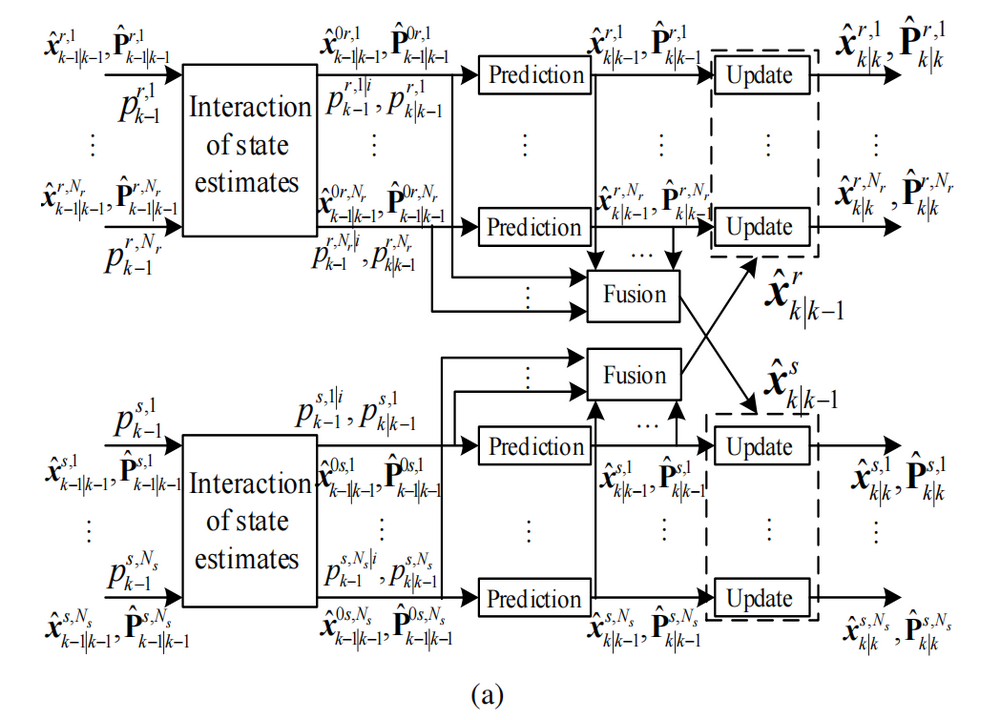
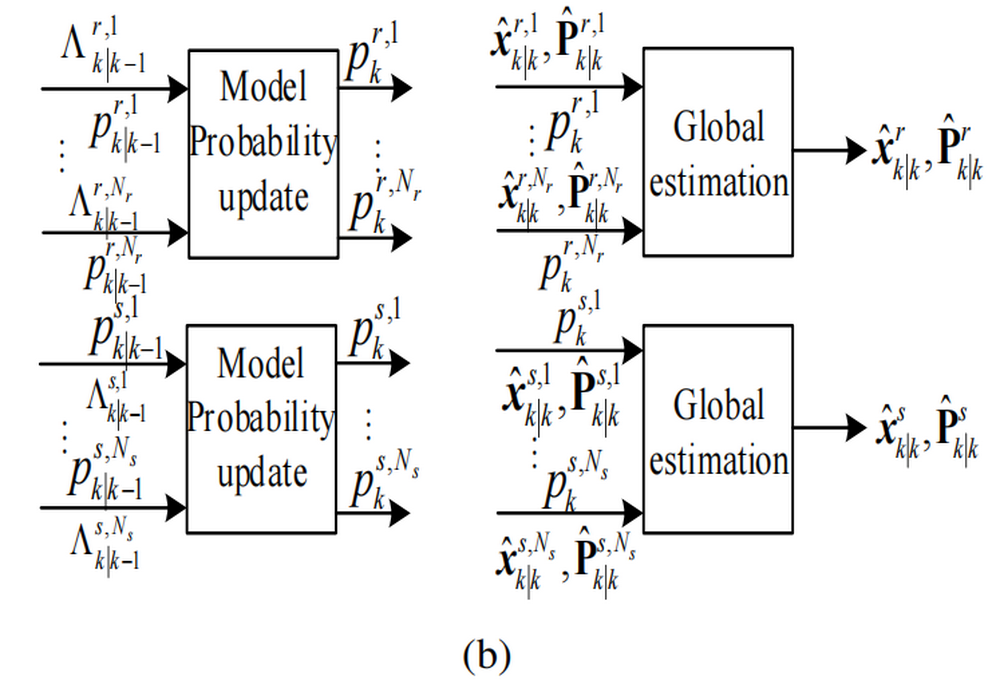
Fig. 2 Algorithmic diagram
To verify the effectiveness of the proposed approach, a lot of simulation experiments and real-world experiments are carried out. Fig. 3 shows that with proposed approach the positions of robots and speakers can be accurately estimated under different measuring errors. Fig. 4 directly gives the localization results with the proposed algorithm. In addition, the algorithm has the potential to combine with the traditional SLAM methods, which may hopefully lead to acoustic SLAM.

Fig. 3 Different localization performance under different measuring errors
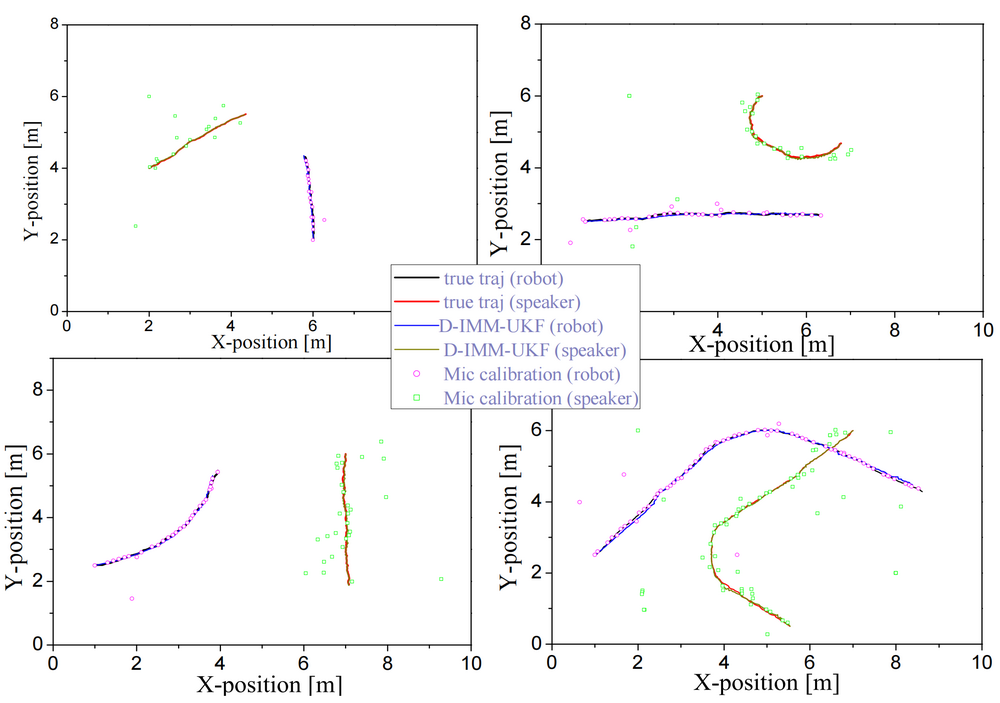
Fig. 4 Tracking results of 4 movements
IEEE Transactions on Intelligent Transportation Systems is the international top journal in the field of smart transportation, which is classified as top journal in the first section of JCR and whose effect factor is 8.5. Hu De, a research fellow with the College of Computer Science(Software) of IMU is the first author of the article and Inner Mongolia University is the first institution to complete the article. The research is supported by the National Natural Foundation of China and the Steed Program of Inner Mongolia University.
URL of the article: https://ieeexplore.ieee.org/document/10173709